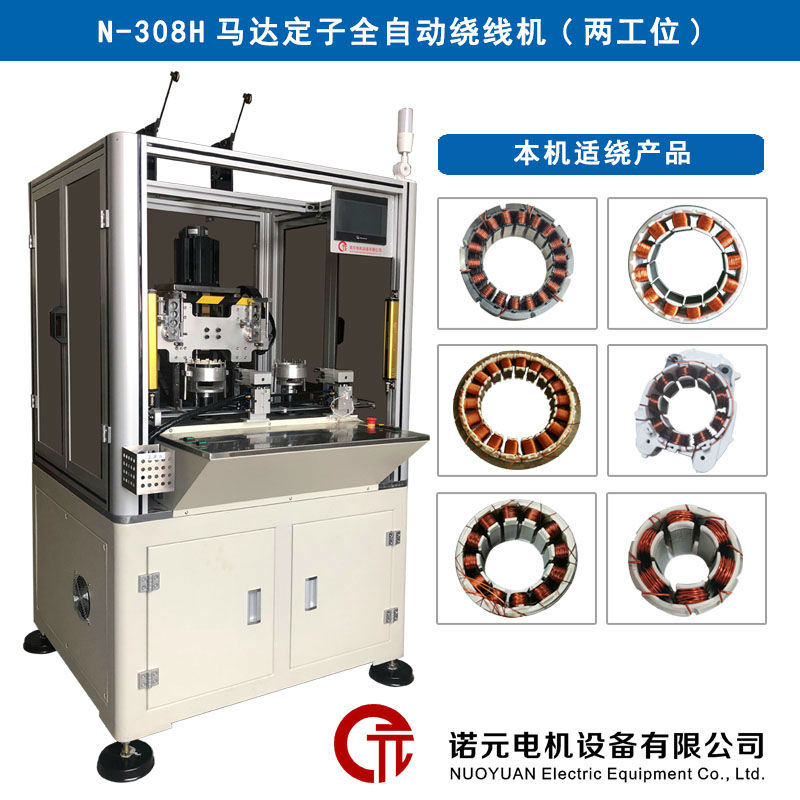
欢迎进入东莞市诺元电机设备有限公司官网!公司主营:无刷绕线机,电机绕线机,马达绕线机,定子绕线机,飞叉绕线机,高速绕线机等!
诺元视频号

0769-81551289
188-1908-5906(微信同号)
136-6288-3566(微信同号)
诺元视频号
0769-81551289
188-1908-5906(微信同号)
136-6288-3566(微信同号)
步进电机是一种开环控制电机,它将电脉冲信号转换为角位移或线性位移。在不失步的情况下,电机速度和停止位置仅取决于脉冲信号的频率和脉冲数,不会受到负载变化的影响。

当步进电动机接收到一个脉冲信号后,电动机将按照设定的方向旋转一个固定角度,称为步距角,通过控制脉冲数以及脉冲频率,控制电动机的角位移量和电动机的转速,实现开环控制效果。
步进电机每步旋转的角度与理论步距之间始终存在相应误差,但步进电机每转的步数是相同的,不失步的话,步进误差不会长时间累积。
1.如何防止步进电机失步:
为防止步进电机失步,合适的步进驱动器选择很重要,这样才能利用其优势控制。选择合适的驱动器时,需要根据电动机的电流配备大于或等于该电流的驱动器。如果需要低振动或高精度,则可以使用细分驱动器。对于高扭矩电动机,请尽可能使用高压驱动器以获得良好的高速性能。对于步进电动机的驱动功率,可以使用常规的环形或R型变压器变换直流电源。
2.步进电机为什么产生共振:
步进电动机的共振是因为电动机接收的脉冲频率等于步进电动机的固有频率 ,和驱动器细分有关。使用步进电机时,驱动器的细分能力比较重要,并且共振范围应尽可能小,电动机负载的惯性大一般是因为电动机过载引起的,解决办法就是防止它过载。

以上便是步进电机产生失步和振荡的主要原因,在实际运用中,一定要掌握基本知识,弄清楚步进电机失步和共振原因,确保机器不要负载。





 扫描二维码,关注诺元公众号
扫描二维码,关注诺元公众号