欢迎进入东莞市诺元电机设备有限公司官网!公司主营:无刷绕线机,电机绕线机,马达绕线机,定子绕线机,飞叉绕线机,高速绕线机等!
诺元视频号

0769-81551289
188-1908-5906(微信同号)
136-6288-3566(微信同号)
诺元视频号
0769-81551289
188-1908-5906(微信同号)
136-6288-3566(微信同号)
随着高科技不断发展,无人机航模技术已经相对成熟,越来越多的朋友喜欢上了它们,在我们日常生活中见到较多的当属多旋翼无人机,旋翼无人机的构成分为4个系统,分别是动力系统、飞控系统、视频系统、遥控系统等,这里我们主要说一下动力系统-电机知识。

电机通常称为马达,可以将电能转换为机械能并驱动螺旋桨旋转,从而产生推力。微型无人机航模动力马达常见有两种:有刷马达和无刷马达。由于有刷马达效率低下,已经逐渐被淘汰。有刷电动机和无刷电机在外观上的主要区别是:当内部有刷旋转时,有刷电动机称为转子,不向外旋转的永磁体称为定子,无刷电动机称为定子,旋转称为定子,外部永磁体的旋转称为转子。
无刷电机有许多技术指标,与无人机的动态特性相关的两个是速度和功率。旋转速度通常以kV表示。所谓的kV是指每伏特(V)可以达到的每分钟空载速度。例如,使用kV1000电动机和11. 1V电池,电动机速度应为1000x11.1 = 11100。 也就是说,每分钟11100转。 即每增加1V,电动机的空载速度就会增加1000转。

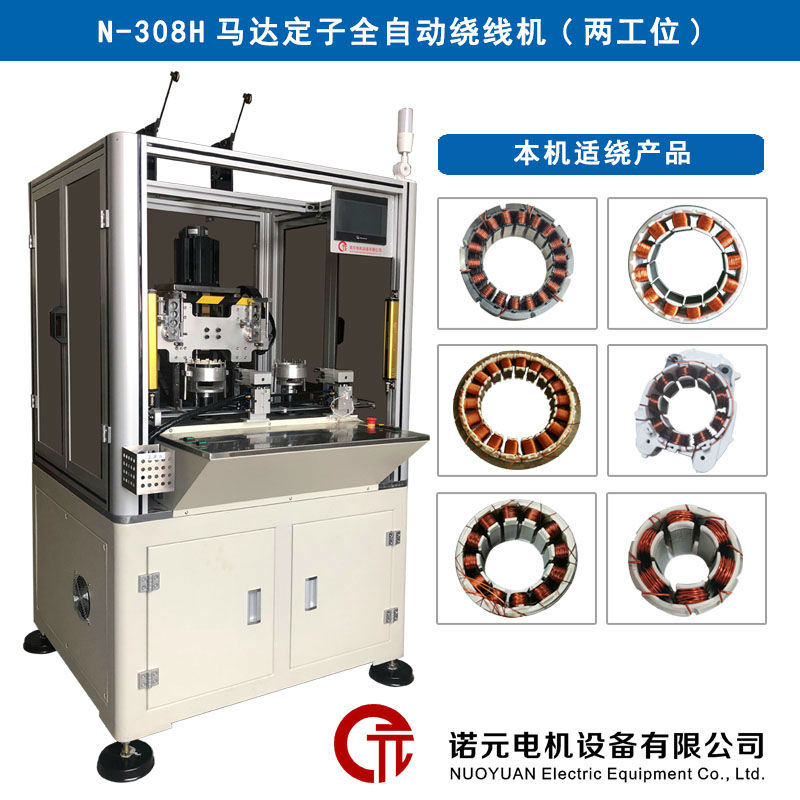
说到无人机电机,不得不提到绕线,绕线很重要,如果线圈绕得不好,将会影响整个动力系统的性能,当然,无人机质量也将大打折扣,现在大多使用全自动绕线机来进行绕线,厂家除了要选择一家好的绕线机厂家外,还应对绕好的产品进行测试检测,确保质量合格后,才用于后续的工序中。





 扫描二维码,关注诺元公众号
扫描二维码,关注诺元公众号