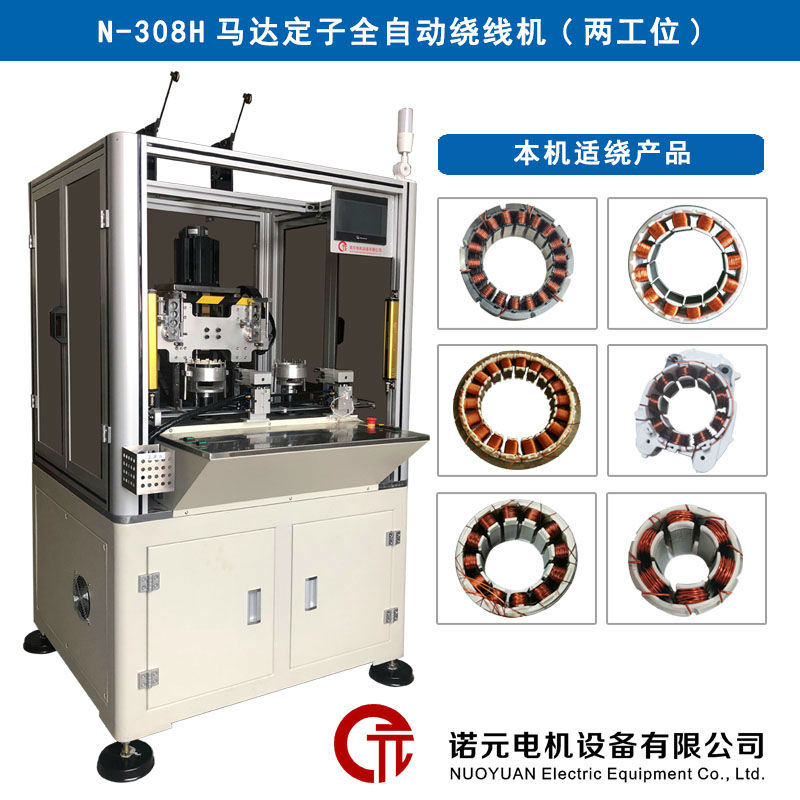
欢迎进入东莞市诺元电机设备有限公司官网!公司主营:无刷绕线机,电机绕线机,马达绕线机,定子绕线机,飞叉绕线机,高速绕线机等!
诺元视频号

0769-81551289
188-1908-5906(微信同号)
136-6288-3566(微信同号)
诺元视频号
0769-81551289
188-1908-5906(微信同号)
136-6288-3566(微信同号)
步进电机是一种机电一体化产品,步进电机的主体及其驱动控制器形成了不可分割的有机整体,步进电机的运行性能在很大程度上取决于所使用的驱动控制器的类型和参数。

由于步进电动机可以直接接收数字信号,因此它们广泛用于数字控制系统中,步进电动机的简单控制电路可以通过各种逻辑电路来实现,例如由门电路和触发器组成的脉冲分配器,此控制方法使用硬件。 一旦确定,就很难更改控制计划,为了改变系统的控制功能,通常重新设计硬件电路,其灵活性较差。 以微机为核心的计算机控制系统为步进电机的控制开辟了一条新途径, 计算机软件或软件和硬件的组合的使用大大增强了系统的功能,并且还提高了系统的灵活性和灵活性,可靠性。
一种数字控制系统,以步进电机为执行器,开环和闭环有两种形式。
步进电机系统的主要特点是可以实现精确的位移,精确的定位以及无累积误差,这是因为步进电动机的运动受输入脉冲控制,并且其位移是间歇性的,总位移严格等于输入命令脉冲数,其平均速度与输入命令脉冲的频率严格成正比,精确控制输入命令脉冲的数量或频率,并且可以在没有系统反馈的情况下完成精确的位置或速度控制,从而形成一个开环控制系统。
步进电机的开环控制系统由控制器(包括变频信号源),脉冲分配器(环形分配器驱动电路(功率放大器)和步进电机)组成。
脉冲发生器生成脉冲信号,其频率从几赫兹连续变化到几十千赫兹。 脉冲分配器根据手指以一定的逻辑关系将脉冲加到每个相绕组的功率放大器,从而使步进电动机以一定的方式运行。 实现正反转控制和定位。 由于脉冲分配器的输出电流仅为几毫安,因此必须进行功率放大,并且步进电机由功率放大器驱动。
开环控制系统的精度主要取决于步距角和负载条件的精度,由于开环控制系统不需要反馈部件,其结构相对简单,工作可靠,成本低廉,因此在数字控制系统中得到了广泛的应用。
在开环控制系统中,控制系统无法预测和监视电机响应控制命令后的实际运行情况。 在某些情况下,如果运行速度较快且负载频繁变化,则步进电机很容易失步,从而使整个系统趋于失去控制。 另外,对于高精度控制系统,使用开环控制通常不能满足精度要求。 因此,必须将反馈链接添加到控制回路中以形成闭环控制系统。 与开环系统相比,还有一个由位置传感器组成的反馈链接。 将位置传感器测得的负载的实际位置与位置指令值进行比较,并使用比较误差信号进行控制,不仅可以防止失步,而且可以消除位置误差,提高精度 系统的。
闭环控制系统的精度与步进电机有关,但主要取决于位置传感器的精度。 在数字位置跟踪系统中,为了提高系统的工作速度和稳定性,还存在一个速度反馈内环。

理论上,闭环控制比开环控制更可靠,但是步进电机的闭环控制系统更昂贵,并且容易引起连续的机械振荡。 如果要获得出色的动态性能,则可以选择其他DC或AC伺服系统。在基于微计算机的步进电动机驱动控制系统中,脉冲发生和脉冲分配功能可以由具有相应软件的微计算机实现,并且电动机的旋转和速度也由微计算机控制, 利用计算机控制,不仅可以以非常低的成本实现复杂的控制过程,而且计算机控制系统具有很高的灵活性,方便了控制功能的升级和扩展。





 扫描二维码,关注诺元公众号
扫描二维码,关注诺元公众号